Obstacle Avoidance And Bluetooth Based Robotic Car
Objective of this Robotic
• The main objective of this project is to design and implementation of a microcontroller based Bluetooth Robotic Car.
• Developing Dc motor based Robotic Car.
• Developing a Robot that is self dependent on movement.
• Objective Detection.
• Obstacle avoidance system.
Design and Working Principle of the Robotic Car
This robot has been designed with Bluetooth device minting, microcontroller, DC motor, DC motor driver, Sensor PCB design and floor sweep fan. In this chapter the design has been explained with a block diagram and where each block and circle represents major components. In this chapter the functions are discussed with working function and block diagram.
Remote For designing the robotic Car, Bluetooth is used to manually control the device. The Bluetooth in controller represents a Bluetooth transmitter circuit which transmits the char signal. The char receiver in device represents a Bluetooth receiver circuit which receives the char signal. The microcontroller takes the output of char receiver as an input and promotes a decision according programmed.
List of Equipment
• Atmega328
• DC motor
• Bluetooth module
• Variable Resistance
• Battery
• PCB or Vero Board
• LED
• IC base
• Car set
• Resistor
• Capacitor
• Diode
• Crystal Oscillator
Working Principal of Ultrasonic:
Ultrasonic sensors transmit ultrasonic waves from its sensor head and again receives the ultrasonic waves reflected from an object. By measuring the length of time from the transmission to reception of the sonic wave, it detects the position of the object.[10]
Formula:uS/58=centimeters or uS/148=inch;or:the range=high level time velocity (340M/s)/2;
Range=high level time * velocity (340M/s)/2;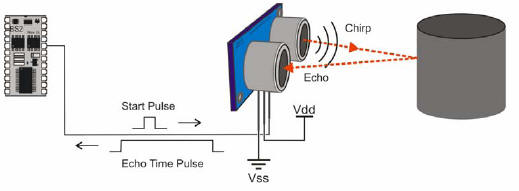
Image of Robotic car
The different view of the robotic Car
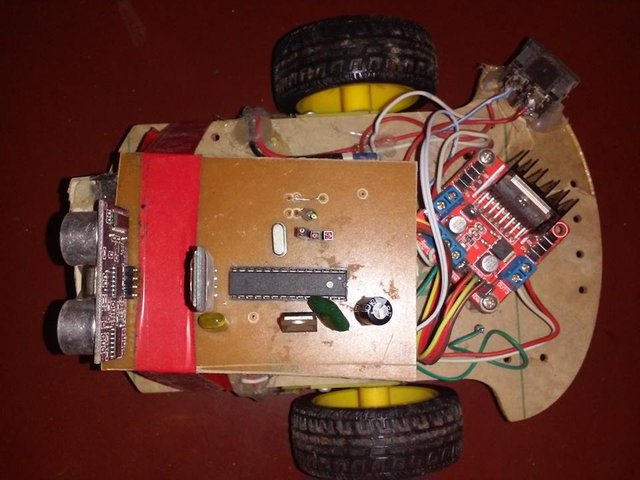
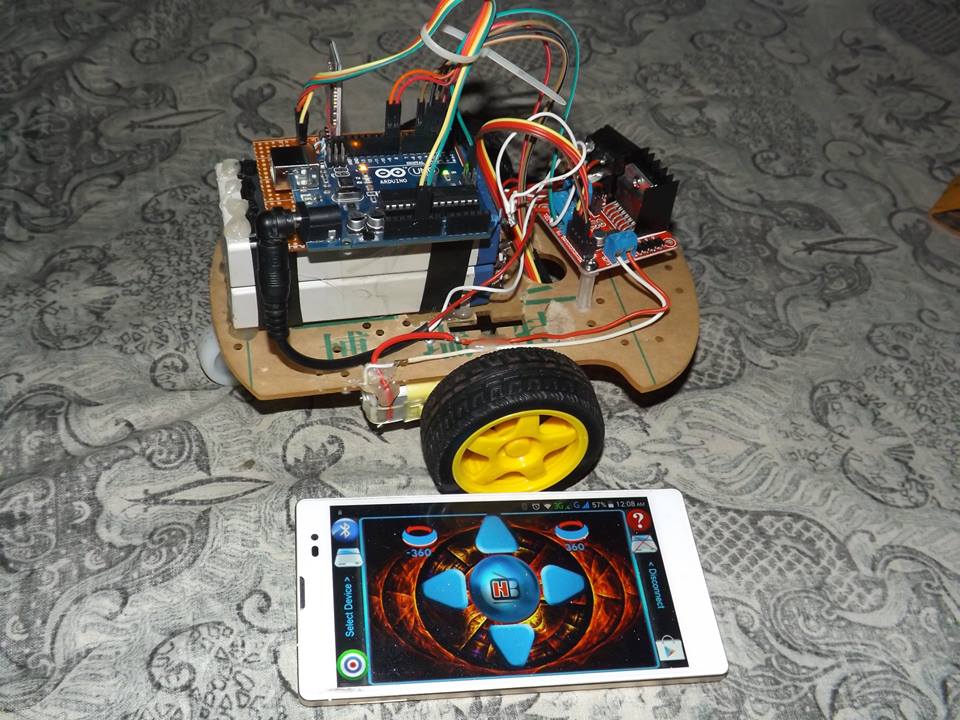
This is front and top view of our Robotic Car. The main objective of this Robot is to design and implementation of a microcontroller based Bluetooth Robotic Car. there used in Bluetooth device where receive signal from Bluetooth robot apps and the microcontroller will receive signal. Then the microcontroller will work accordance programming instruction.
Overall Operation
The Robotic car has four main parts like Bluetooth, Ultrasonic, Dc motor driver and microcontroller. Firstly Bluetooth communicats the signal from android mobile and operate the microcontroller. Secondly ultrasonic measure the distance forward of any object and assistance the microcontroller of algorithm.
Dc motor driver take a output signal from microcontroller and derived the Dc motor. Then the microcontroller execute all of work properly.
++= hope you guys enjoy it=++
And this is Shimul . Follow and upvote @shimul
:) Beauty is in heart not in face :)