BRAZO ROBOTICO con ARDUINO | Proyecto realizado por varios compañeros de Steemit !
Hola comunidad! Hoy les traigo un proyecto realizado por 4 miembros de Steemit un BRAZO ROBOTICO a base de ARDUINO.
Mi persona @rvilov y mis compañeros @hadro @greylml @josepxh

¡Primero que nada Feliz año nuevo de mi parte queridos Steemers!
¡COMENCEMOS!
¿Qué es un brazo robotico y que es ARDUINO?
Un brazo robotico es un robot programable con base fija, el cual tiene forma de brazo (de ahí su nombre) , esta diseñado para que su función principal sea moverse imitando un brazo y una muñeca humana para ya sea tomar objetos o simplemente moverlos.

Este brazo que realizamos esta programado con la tecnología ARDUINO la cual permite de manera fácil unir el Hardware con la parte del Software, a través de una placa que contiene un circuito de código abierto (un circuito de código abierto rápidamente es un circuito al que le podemos modificar su función) dentro de ella.
Si quieres saber mas aca te dejo un link de la pagina oficial de ARDUINO : http://arduino.cl/que-es-arduino/
¿Qué materiales usamos?
HARDWARE:
- SERVO-Motores
- Piezas de plástico
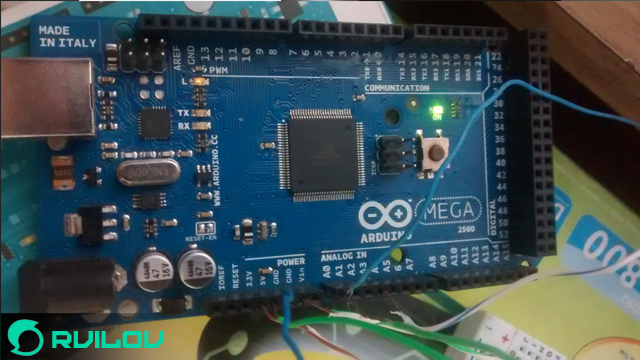
- Placa de ARDUINO MEGA
- Cable USB
- Protoboard
- Potenciómetros
- Cables para Protoboard
- Fuente de Poder
SOFTWARE:
- Programa de arduino
- Proteus para la simulación (versión +7.0)
¿Cómo lo hicimos?
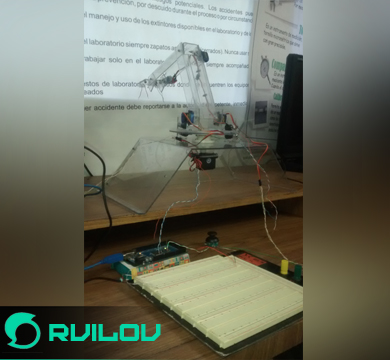
Primero que nada se debe tener la estructura del brazo completamente armada, por suerte ya teníamos la misma terminada con las piezas de plastico , la cual consta de 5 Servo-motores que son motores rotatorios especiales para este trabajo ya que se pueden programar y las demas piezas plásticas para dar la forma de brazo.

Aca podemos ver cada uno de los motores:
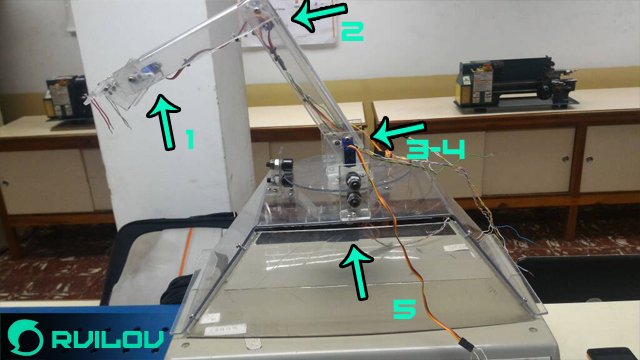
1= Muñeca
2 = Antebrazo
3 y 4 = Movimiento Arriba-Abajo
5 = Movimiento Rotatorio
Los cables de cada Motor fueron guiados a través de su estructura de manera que quedara cómodo para su instalación al ARDUINO.
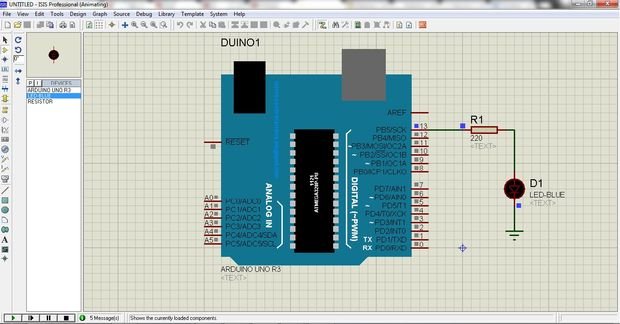
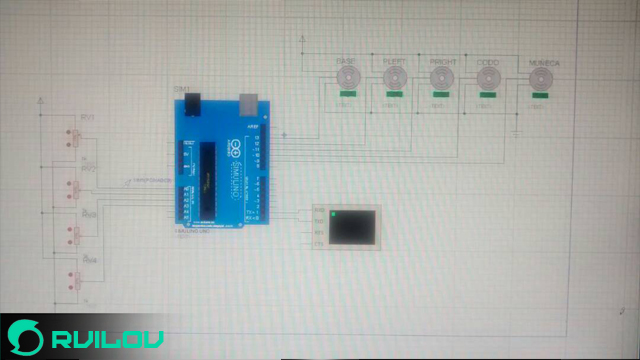
Antes de conectar todo con todo , debemos simular nuestro proyecto de manera virtual, para esto usamos el Software llamado Proteus el cual se ve algo así:
{kind=link}
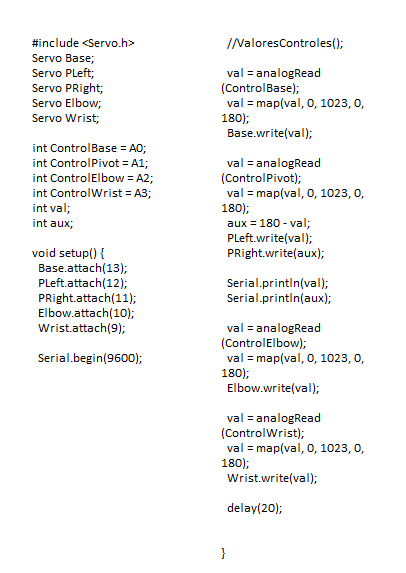
Nuestro programa terminado y funcional quedo de esta manera:
Usando el Software de ARDUINO podemos escribir el código que sera insertado en la placa.
Así se ve la interfaz de ARDUINO:
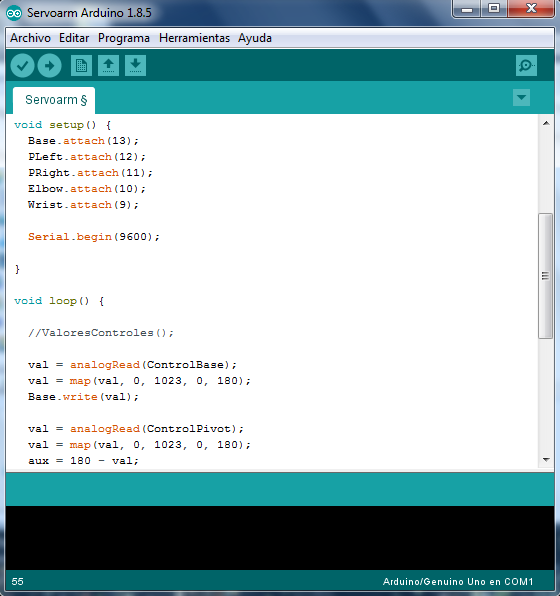
El código que usamos en la simulación:
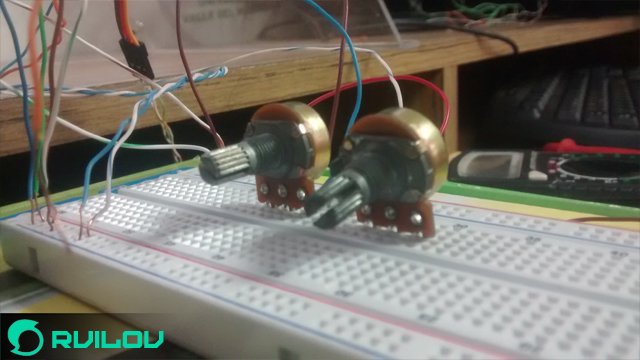
Procedimos a conectar los motores al protoboard y del mismo al ARDUINO
Seguido conectamos los potenciometros, estos se usarían para mover cada motor, es decir al rotar un potenciador un motor también seria rotado.
Ahora si podemos cargar el programa al Arduino a travez del cable USB (si ese de allí es @hadro) :

Obviamente a la primera no funciono, fueron 2 semanas probando de manera intensa cada código nuevo y encontrando la manera ideal en la que todo debía ser conectado.
Tambien nos tomo bastante tiempo porque intentamos conectar un Joystick de pc al ARDUINO, para controlar el brazo:

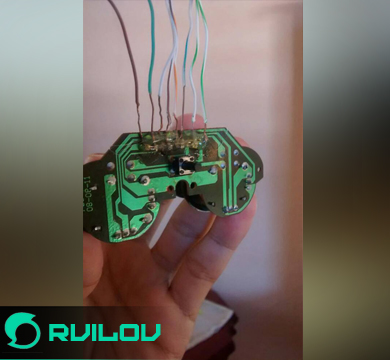
Lastimosamente la placa de nuestro Joystick se daño, y volvimos con nuestro proyecto inicial a base de potenciómetros.
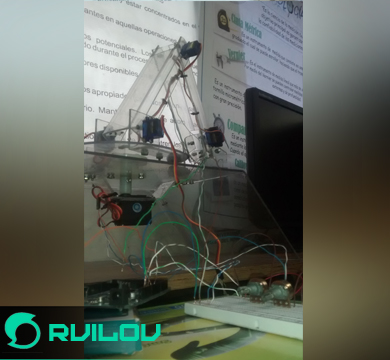
Aca un video de cómo funcionaba con los potenciómetros:
Bueno y eso fue todo en el transcurso de 3 semanas del mes de diciembre en los laboratorios de nuestra universidad, espero y los anime a realizar proyectos de este tipo con sus amigos amantes de la tecnología. Es un placer compartir nuestros proyectos con ustedes!
Excelente muy bueno, un importante proyecto a tomar en cuenta
Y una experiencia que te deja mucho!!!
Excelente post, me lo lei completo y muy buen trabajo @originalworks
The @OriginalWorks bot has determined this post by @rvilov to be original material and upvoted it!
To call @OriginalWorks, simply reply to any post with @originalworks or !originalworks in your message!
Muy interesante! Algun dia me planteare hacer uno... gracias por compartir! Un saludo! ;)
Nada mejor que hacerlo tú mismo!
Bonito proyecto y sobre todo felicidades por el esfuezo
Muchas graciaaas!!
Sencillamente Épico, lastima que se daño el joystick...
Podría haber sido mucho mas épico jajaja