ESTÁTICA APLICADA: análisis por movimiento infinitésimo de sistemas materiales de 1 grado de libertad
Bienvenidos a todos, saludos cordiales a los integrantes de esta comunidad científica habla hispana de Steemit. Volviendo a añadir mi grano de arena a la cadena de bloques de Steem luego de varios meses sin publicaciones, les traigo un nuevo artículo referente a la Estática Aplicada, asignatura base para el estudio del Análisis Estructural en la Ingeniería Civil.
En esta ocasión nos enfocaremos en un procedimiento llamado “criterio de movimiento infinitésimo” o “análisis de movimiento infinitesimal” empleado en sistemas materiales que poseen un (1) grado de libertad, es decir, sistemas cuyos puntos solo pueden moverse a través de una trayectoria única, a partir de un centro instantáneo de rotación (polo) único e invariable para cada eslabón o chapa del sistema.
Si bien procedimientos y análisis de este tipo no son usuales de encontrar en libros convencionales de Estática para Ingeniería (o bien son explicados de una manera muy simplificada y con otro nombre), la realidad es que resulta ser una herramienta importante para teorías y aplicaciones de temas más avanzados del análisis estructural que se estudian en la carrera de Ingeniería Civil. Durante mis estudios en la Universidad Central de Venezuela, este tema formó parte del contenido de la asignatura Estática Aplicada, posteriormente fui preparador (teacher assistant) de esta asignatura lo que me llevó a comprender más a fondo estos temas con el objetivo de facilitar la comprensión de la materia a los estudiantes de la misma ya que el material de consulta disponible es bastante limitado.
Todo el material sobre Estática Aplicada se ha recopilado en la siguiente publicación:
Material para Estática Aplicada.
Introducción
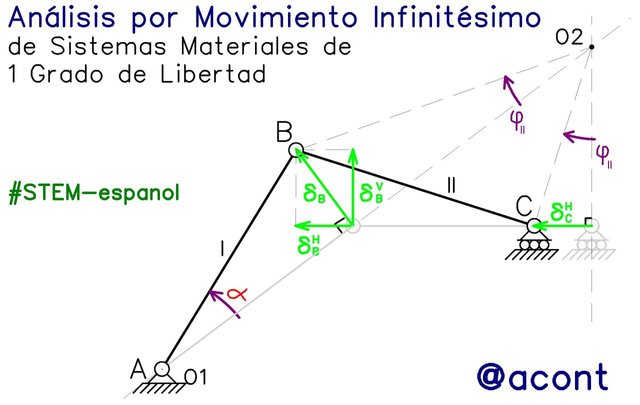
El análisis por movimiento infinitesimal consiste en caracterizar el movimiento de un sistema material de un (1) grado de libertad (1 GL) a través de la aplicación de una rotación infinitésima arbitraria a una de sus chapas o de un desplazamiento a uno de sus puntos producto de la rotación infinitésima. Es decir, a través de este procedimiento podemos determinar las magnitudes de la rotación de cada una de las chapas de un sistema material, así como también la magnitud del desplazamiento de cada uno de sus puntos, todo en función de un parámetro único (usualmente una rotación arbitraria “α” asignada a alguna de las chapas).
Tal como se constató en el artículo Análisis de Estabilidad de Sistemas Materiales Parte I: teoría y caso práctico el análisis por movimiento infinitésimo es aplicable a cadenas cinemáticas de 1 grado de libertad (1 GL), en la cual se tiene un conjunto de chapas vinculadas ente sí conformando un sistema material de 1 GL. Así mismo, se observa en dicho artículo un pequeño ejemplo de la realización del análisis por movimiento infinitésimo, procedimiento al cual dedicaremos esta publicación por completo.
Según lo dicho hasta ahora puede resultar inevitable para el lector realizarse la siguiente pregunta:
¿Qué tiene que ver el movimiento de un mecanismo de 1 GL con la ESTÁTICA en la Ingeniería Civil?
En primer lugar, en el estudio de la Estática Aplicada se debe aprender a analizar la estabilidad de sistemas materiales (tal como se abordó en previas publicaciones) y esto no solo trata de reconocer cuando un sistema material es totalmente estable, sino que incluye también analizar sistemas inestables y llegar a la conclusión de cómo y porqué lo son. Por ello se hace importante reconocer de qué manera y en qué medida se presenta la inestabilidad de sistemas materiales ante la posibilidad de presentar movimiento (de magnitudes infinitésimas, porque de lo contrario estaríamos hablando de Mecánica y no de Estática Aplicada).
Por otro lado, tal como se mencionó anteriormente, el análisis por movimientos infinitésimos tiene aplicaciones importantes en temas de Análisis Estructural que se estudian en cursos más avanzados del área de Estructuras en Ingeniería Civil. Solo por citar un ejemplo, para determinar la matriz de flexibilidad de un sistema estructural hiperestático plano, se debe aplicar el criterio de movimiento infinitésimo a cada subsistema producto de las hipótesis restrictivas dadas a cada miembro (área e inercia infinitas) para así determinar los valores de cada columna de la matriz.
Volviendo a Estática Aplicada, el análisis por movimiento infinitésimo es el origen de otros procedimientos aplicables a sistemas materiales de 1 GL como lo son el Diagrama de Williot y los Diagramas Cartesianos de Desplazamientos, estos últimos son de gran utilidad para aplicar el Principio del Trabajo Virtual para Cuerpos Rígidos en el cálculo de fuerzas en sistemas isostáticos sometidos a cargas externas.
Fundamentos Matemáticos
Tal como se ha expresado en el artículo Estática Aplicada: los Vínculos y su Aplicación a Sistemas Estructurales en la Realidad, en la Estática Aplicada debemos pensar en las vinculaciones como condiciones restrictivas del movimiento de las chapas que pueden admitir solo un pequeño grado de desplazamiento y/o rotación. De igual manera sabemos que los desplazamientos en una estructura suelen ser de pequeño orden en comparación a las dimensiones de la misma. En consecuencia, a la hora de realizar algún análisis resulta práctico asumir que los movimientos son de orden infinitesimal para así simplificar algunos cálculos, tal como vemos a continuación.
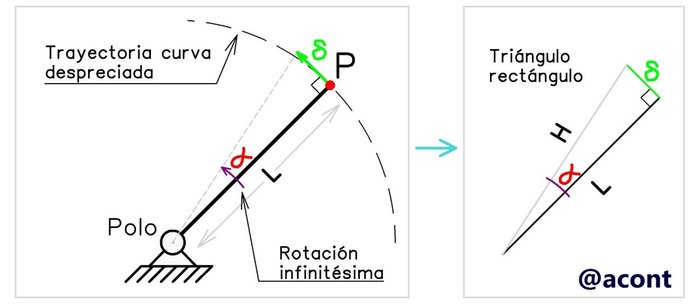
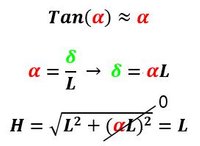
Al analizar el movimiento de un determinado punto “P”, ya que hemos despreciado la trayectoria curva, estamos considerando que solo existe una componente tangencial de desplazamiento, por lo que debemos asumir que no cambia la longitud de la barra ante una rotación infinitésima de la misma, y esto se demuestra mediante el triángulo rectángulo formado. Para ángulos cercanos a cero la tangente se asume igual a la magnitud del ángulo. En base a esto calculamos la magnitud del desplazamiento “δ” en función al ángulo de rotación y al radio de giro “L” de dicho punto P. Posteriormente calculamos “H” utilizando el Teorema de Pitágoras:
Respetando así la hipótesis de que las chapas son cuerpos rígidos indeformables y no sufren deformación alguna al despreciar una componente del movimiento. Entonces cada vez que un punto sufra un desplazamiento producto de la rotación infinitésima, este simplemente se dará de manera tangencial.
Así mismo, debemos referirnos a otra propiedad de las chapas sometidas a rotaciones de orden infinitesimal, tal como lo explica Hernández (1998):
”…una rotación infinitésima es una transformación biunívoca del plano…por efecto de la cual todos los puntos experimentan corrimientos en una misma dirección. Todo punto situado sobre la vertical de i tendrá el mismo desplazamiento vertical debido a que tienen la misma abscisa; de igual forma, todo punto situado sobre la horizontal de i tendrá el mismo corrimiento horizontal”. (p. 48).
En tal sentido, Hernández explica que un punto “i” sobre una chapa que sufre una rotación infinitésima, tendrá una componente vertical y una componente horizontal de desplazamiento, y cualquier punto (de dicha chapa) situado vertical a dicho punto tendrá exactamente la misma componente vertical de desplazamiento que tiene el punto “i” y lo mismo aplica para cualquier punto situado horizontal a “i” el cual tendrá la misma componente horizontal de desplazamiento del punto “i”. El punto “i” según Hernández puede representar el punto “P” de la figura anterior.
Procedimiento
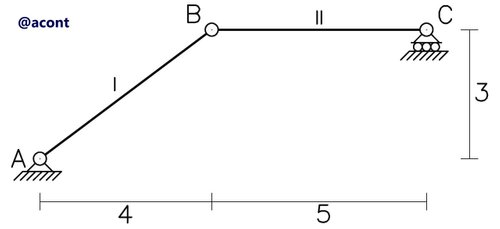
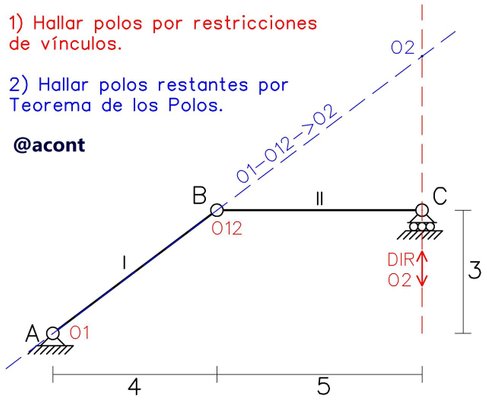
La Figura N°2 muestra un ejemplo simple de un sistema material de 1 GL compuesto por dos chapas o cuerpos rígidos, una articulación fija a tierra en el punto A, un vínculo interno en B representado por una rótula o articulación interna y un apoyo simple en C.
Nos ahorraremos el cálculo previo de los grados de libertad mediante la ecuación abordada en la publicación Determinación Algebraica de los Grados de Libertad de Sistemas Materiales ya que sabemos que el sistema posee 1 GL. Vamos directo al análisis por movimiento infinitésimo.
Paso N°1. Hallar los polos del sistema material.
En el artículo Análisis de Estabilidad de Sistemas Materiales Parte I: teoría y caso práctico y en artículos posteriores, se demostró la aplicabilidad del Teorema de Kennedy (o Teoremas de los Polos) en cadenas cinemáticas de 1 GL para hallar los centros instantáneos de rotación (polos) de cada una de las chapas del sistema mediante la siguiente expresión:
La cual representa el primer Teorema de los Polos (1mer TDP) e indica que el polo absoluto entre dos chapas “i” y “j” deben de estar alineados con el polo relativo entre ellas.
En cadenas cinemáticas de 1 GL, siguiendo a Rodríguez (2003): “El análisis de los desplazamientos se realiza en función de los centros instantáneos de rotación (Polos), absolutos y relativos”. (p. 29). Para ello, tal como se observa en la Figura N°3, primero hallaremos los polos dados por las restricciones de vínculos y luego aplicamos el 1mer TDP para hallar el polo restante (chapa II).
Paso N°2. Aplicación de rotación arbitraria “α” a una de las chapas.
Tal como se observa en el GIF (Figura N°4), se le ha asignado a la chapa I una rotación arbitraria “α” en sentido antihorario. El sentido de esta rotación también es arbitrario y solo invierte los signos del resultado final.
Según Rodríguez (2003): “Por definición de Movimiento Infinitésimo, el Vector Desplazamiento del Punto “B” debe ser normal al vector de posición que une el polo absoluto de la Chapa “I” con su polo relativo “O12””. (p. 29). Aunque Rodríguez se refería a otro sistema material, el mismo es similar al presentado en este artículo y aplican las mismas condiciones. Dicho en otras palabras, ya que el polo de la chapa I se encuentra en A, sabemos que el desplazamiento del punto B será dado en dirección perpendicular al radio vector que une al polo con dicho punto. Ya que el punto B pertenece tanto a la chapa I como a la chapa II, entonces al unir la posición original del punto B con el polo O2 obtenemos el radio de giro del punto B respecto a la segunda chapa, conformando así el ángulo de rotación “φ” de la chapa II.
El desplazamiento del punto C será entonces horizontal, porque es la dirección perpendicular al radio vector del polo O2 a C y además es la dirección de desplazamiento permitida por el apoyo simple (articulación móvil o “patín”) en C.
Cabe destacar que en la Figura N°4 los desplazamientos están representados en una escala muy aumentada para así mostrar la manera en que se mueve el sistema sin olvidar que la rotación “α” es de orden infinitesimal y estamos asumiendo que no se presenta deformación en las chapas del sistema.
Paso N°3. Cálculo de la magnitud de los desplazamientos y rotaciones.
Ahora solo queda por conocer la magnitud de los desplazamientos de los puntos del sistema material y de la rotación de la chapa II.
Existe una forma simplificada de calcular la magnitud de las componentes horizontal y vertical de los desplazamientos en direcciones inclinadas y la misma consiste en utilizar una propiedad de los vectores en la que se puede trasladar el origen de los mismos hacia otra ubicación conservando su módulo, dirección y sentido.
En la Figura N°5 podemos observar cómo se ha determinado la magnitud de la componente horizontal del desplazamiento de B y posteriormente la vertical conocido el ángulo de rotación.
.gif)
El procedimiento consiste en trazar un rectángulo desde el polo hasta la posición original del punto en cuestión (rectángulo en azul claro). Luego se traslada la componente horizontal del desplazamiento de B hacia el extremo izquierdo superior del rectángulo. De esta manera obtenemos un nuevo triángulo donde conocemos el ángulo “α” y sabemos que la distancia vertical es de 3 unidades, por lo que aplicando la tangente obtenemos:

Lo mismo aplica para la componente vertical del desplazamiento de B donde la distancia horizontal es de 4 siendo entonces 4α su magnitud.
De lo anterior podemos decir que: para rotaciones infinitésimas, la magnitud del desplazamiento horizontal de un punto es igual a la distancia vertical del polo al punto en cuestión multiplicada por el ángulo de rotación, y viceversa. Esto es la aplicación directa de la propiedad que hemos visto anteriormente en la que todos los puntos que se encuentran vertical al punto “i” poseen la misma componente vertical de desplazamiento que el punto “i” y de igual manera para la componente horizontal.
Para determinar el ángulo de rotación de la chapa II procedemos de forma inversa a lo anteriormente realizado, ya que esta vez conocemos la magnitud del desplazamiento, pero no la del ángulo de rotación.
Tal como se observa en la Figura N°6, primero generamos un rectángulo que va desde la posición original del punto B hasta el polo O2. Ya conocemos la magnitud de la componente vertical del desplazamiento de B por lo que trasladamos verticalmente hacia arriba el vector hasta la esquina superior izquierda del rectángulo generado previamente. Se genera un triángulo en el cual ya conocemos la magnitud de ambos catetos (4α la magnitud del vector y 5 la distancia horizontal).
Podemos determinar la magnitud del ángulo de rotación:
Finalmente, la magnitud del desplazamiento del punto C es determinada directamente trasladando el origen de la componente horizontal del desplazamiento de B horizontalmente hasta el extremo derecho inferior del rectángulo azul (Figura N°7).
.gif)
Se obtiene entonces que ambos desplazamientos son iguales en magnitud y sentido. Esto se puede asumir solo entre los puntos de una misma chapa para movimientos de orden infinitésimo. De nuevo, estamos aplicando la misma propiedad dada anteriormente, ya que la componente horizontal de desplazamiento resulta ser la misma para todos los puntos de la chapa II que se encuentren horizontales al punto B (refiriéndonos a la imagen no deformada del sistema de la Figura N°7).
Si se busca determinar la magnitud del desplazamiento de C a través del triángulo que se forma superior al vector, primero debemos determinar la distancia vertical desconocida mediante trigonometría para luego aplicar la tangente, llegando así al mismo resultado. Por ello la simplificación realizada anteriormente adquiere valor práctico. Se deja al lector realizar esta comprobación.
En la Figura N°8 se muestra un resumen de los resultados del análisis por movimiento infinitésimo, los cuales son expresados en cantidades vectoriales con su respectiva magnitud y dirección.

Tal como podemos observar en la imagen anterior, todos los desplazamientos y rotaciones han sido expresados en función de un solo parámetro independiente “α” lo cual entra en consonancia con el hecho de que el sistema material posee 1 grado de libertad, es decir, posee solo una forma de moverse y por lo tanto los movimientos de todos sus puntos son dependientes de un parámetro único (en este caso la rotación asignada a la chapa I).
Este artículo se ha limitado a representar el procedimiento para un sistema material sencillo de solo dos chapas, sin embargo, para sistemas materiales más complejos no hay nada realmente nuevo más que aplicar lo mismo que se ha visto hasta ahora exceptuando casos específicos que requieren algún análisis adicional, como por ejemplo sistemas que incluyen bielas paralelas como vínculos internos, aunque eso ya queda para las siguientes publicaciones.
Conclusiones
Referencias Bibliográficas
Hernández, Suilio. (1998). Estática Aplicada. Folleto Editado por el Departamento de Ingeniería Estructural U.C.V. Caracas.Fuente
Rodríguez, Iván. (2003). Estática de las Estructuras.Fuente
Material recomendado
Imágenes y ecuaciones de autoría propia realizadas mediante LibreCAD y Microsoft Word. Gif creados mediante Giphy.com.
Material de Estática Aplicada.
@tipu curate
Upvoted 👌 (Mana: 20/25 - need recharge?)
Grazie @girolamomarotta
Prego, ottimo lavoro 👍👌
Exelente trabajo!!! Felicidades!!!
Muchas gracias @dra.karina por su comentario! Veo que recientemente ha empezado su blog y escribe sobre temas relacionados a la salud, la invito a unirse a la comunidad de #STEM-espanol donde se publican y valoran artículos relacionados con la ciencia, tecnología, ingeniería y matemáticas en idioma español. Acá el link del canal de Discord donde puede unirse y encontrar información útil los canales #informacion y #post-informativos. Acá dos artículos donde puede encontrar también información útil para cumplir las Normas y criterios: Normas STEM-espanol y Directrices sobre derechos de autor. Saludos!
Muchas gracias!!! intento entrar en el link, pero no encuentro el canal ¿como se llama el canal?
Intente desde este enlace de invitación: https://discord.gg/CxveuQ
Es bueno tenerte de vuelta @acont. Gracias por esto!
Gracias a usted @carloserp-2000 por el apoyo, pues nuevamente aportando contenido a la blockchain para crear una referencia más detallada sobre la Estática Aplicada. Por cierto fui alumno del Prof. Iván Rodríguez (Q.E.P.D.) en esta materia y su guía es inspiración para este blog. Saludos!
This post has been voted on by the SteemSTEM curation team and voting trail. It is elligible for support from @curie and @minnowbooster.
If you appreciate the work we are doing, then consider supporting our witness @stem.witness. Additional witness support to the curie witness would be appreciated as well.
For additional information please join us on the SteemSTEM discord and to get to know the rest of the community!
Thanks for having used the steemstem.io app and included @steemstem in the list of beneficiaries of this post. This granted you a stronger support from SteemSTEM.
Gracias por el apoyo de la comunidad científica #SteemSTEM.
Congratulations @acont! You have completed the following achievement on the Steem blockchain and have been rewarded with new badge(s) :
You can view your badges on your Steem Board and compare to others on the Steem Ranking
If you no longer want to receive notifications, reply to this comment with the word
STOPVote for @Steemitboard as a witness to get one more award and increased upvotes!