Effectivism : Simulative Emotional Expression Robot

Humans already find it unnerving enough when extremely alien-looking robots are kicked and interfered with, so one can only imagine how much worse it will be when they make unbroken eye contact and mirror your expressions while you heap abuse on them.
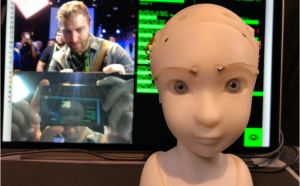
“SEER (Simulative Emotional Expression Robot)” by Mr. Takayoshi Todo, an artist, is a compact animatronic humanoid robot pursuing a line of sight that recognizes and looks at the human face and the expressive power of expression. A line of sight is expressed by a control that connects the eyeball towards a virtual gazing point and an eyebrow made up of soft elastic wire.
The robot is capable of focusing on a particular point of view, without being able to confuse it by moving the neck. Consequently, it seems that the robot has its own purpose during the tracking and monitoring of the surrounding people and the environment.
Now the robot can be switched between two modes. These are imitation and eye contact. Both use information from nearby (or built in) cameras, tracking humans and recognizing facial expressions in real time.
In impersonation mode, it recognizes the position of the target human head, movement of eyeballs and eyelids and reproduces it on SEER side. Its implementation is not yet complete, it sometimes freezes or randomly vibrates. This is because the removal of noise from the expression data is still not perfect.
In eye contact mode, the robot initially actively moves first. And if it recognizes the human eye in the vicinity, it commences eye contact. This also brings a strange feeling, but less eerie as in the case of certain robots. It seems like you are showing a bad SFX when the robot’s face is poorly shaped, but SEER has realism enough to make sudden deep empathy embrace. Real humans are more expressive, naturally, but this little face with its creepily realistic eyes plunged deeply into the uncanny valley and nearly climbed the far side.
“SEER” has meaning as a viewer. Eyes are not only input devices but also output devices.
Instead of directly inputting each degree of freedom of the robot by giving parameters to the interlocking relation made in advance, it is possible to create a face without collapse. The position of the eyebrow can be shifted to the outside or towards the inside by changing the rotation of both ends of the eyebrow. Unlike an animatronics robot, instead of reproducing the movement of the muscles of the face, it grasps the eyebrows as a line and tilts the rotation axes at both ends, so that a curve is drawn like a Bezier curve. As a result, it forms a three-dimensional facial expression as a symbolic expression like a cartoon.
Normally, in a neutral state, the eyelids are weak and do not follow eyeball movements. However, when you are staring at something, the eyelids are entered with force and actively move. In other words, if there is a natural interlocking relationship between movement of the eyeball and the eyelid, the eyes become a natural impression. SEER dynamically sets the position of the neutral eyelid and gives the eyelid’s position by plus or minus relative to it.
For face recognition, robotics used Kinect before, but this time it uses a small camera. The aperture of the camera is in front of the chest. It is interleaved with other holes, and devised so as to be inconspicuous.
With regard to facial expression “SEER” is said to be almost satisfied. In the future it will be more interesting to expand the relationship of the gaze from one to many. For now SEER is an experimental art project, but technologies that make this possible will be integrated into various smart assistants in the near future.