ROBOTICS: BUILDING AN UNMANNED SHOOTING MACHINE PROTOTYPE
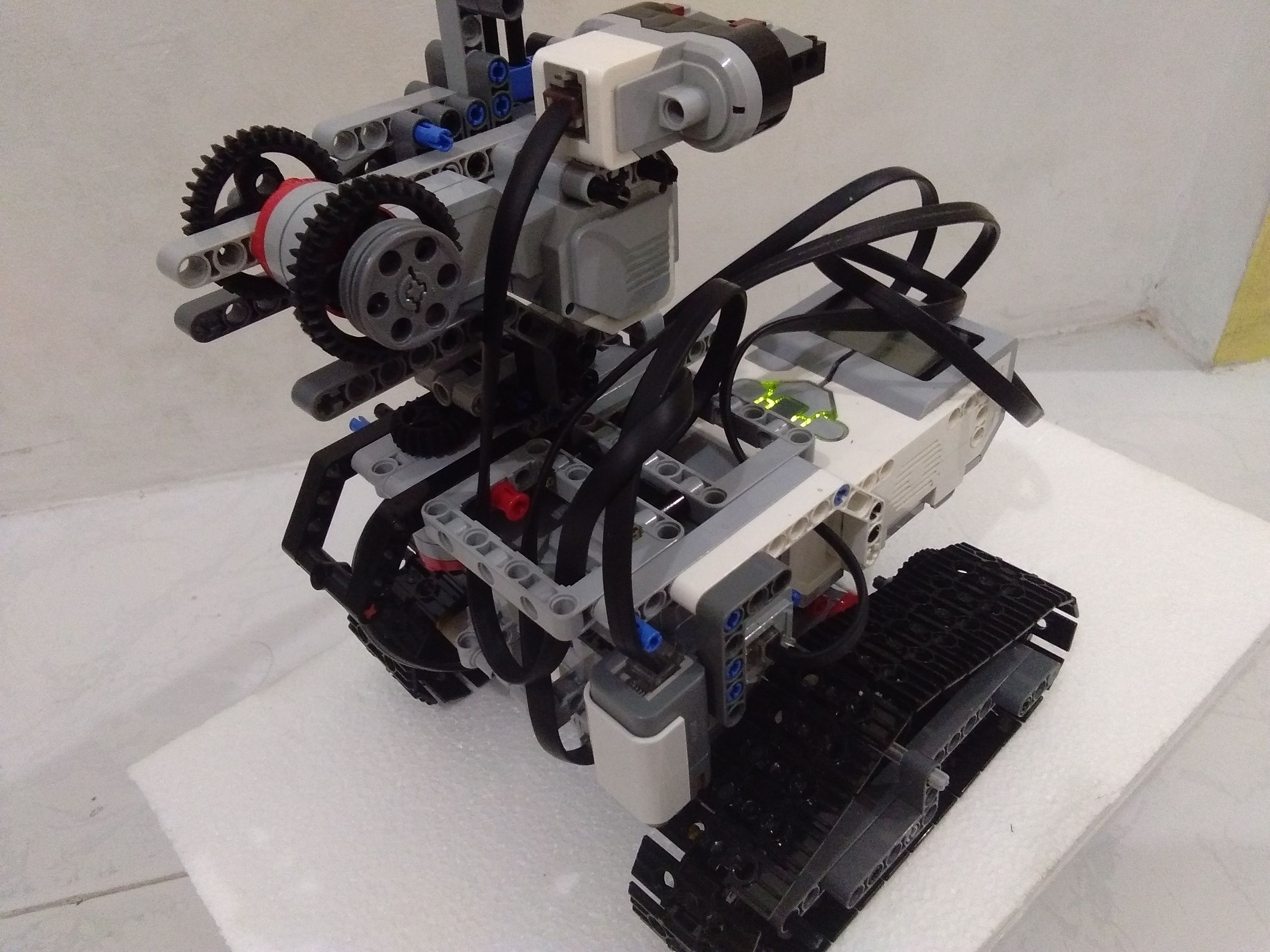
Powered by four motors, equipped with sound sensor and ultrasonic sensor. This unmanned shooting machine prototype can perform a realistic performance. Ability to find target within its range, shoots the target, and can maneuver effectively on a smooth or uneven terrain. The miniature heavy cannon shooting mechanism was made possible by converting a rotational motion into a linear motion.
{kind=link}
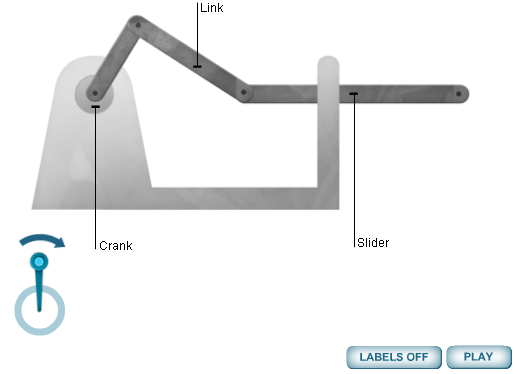
This is the diagram that shows the conversion of rotating motion into a straight or linear motion.
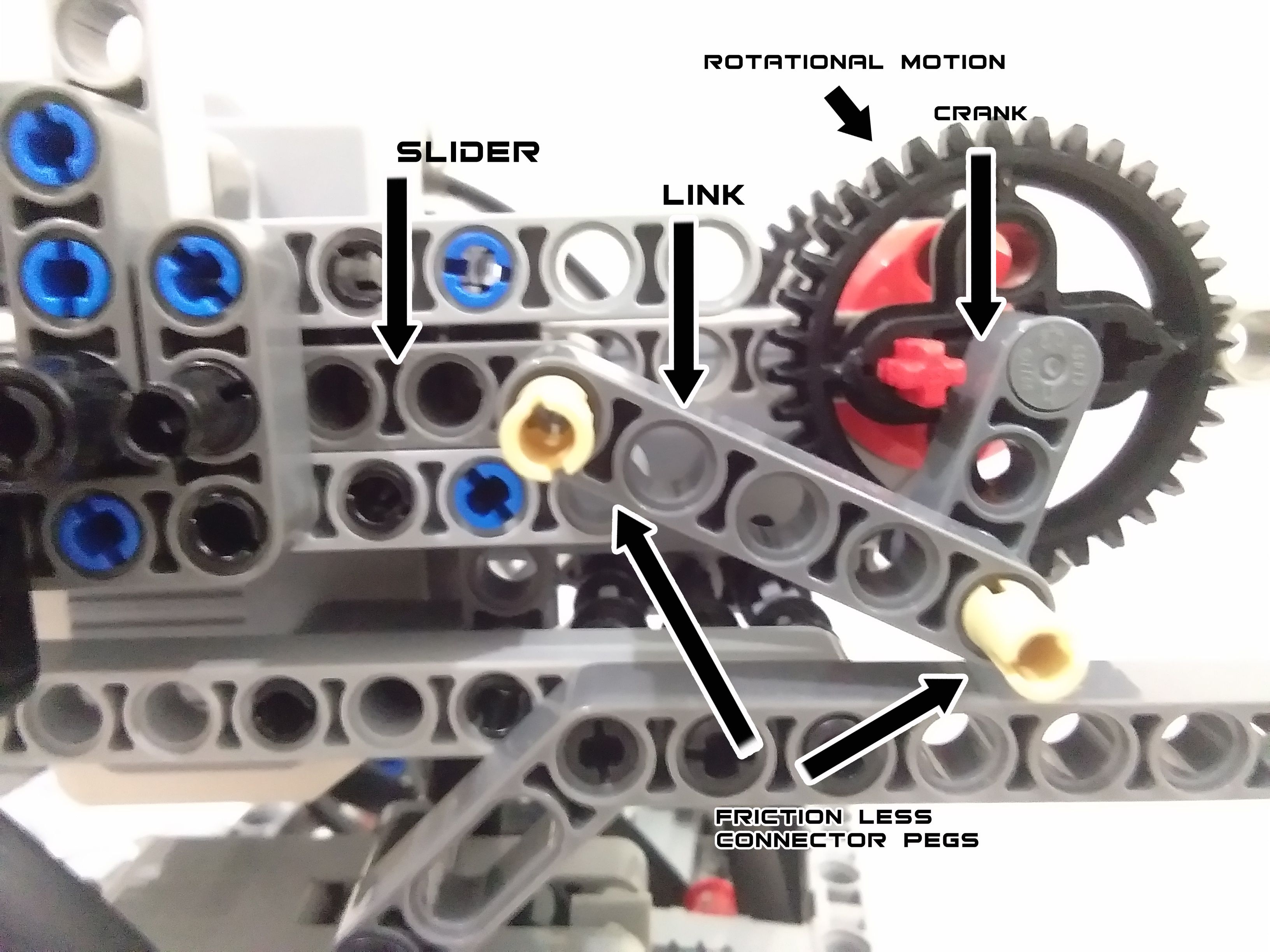
Here is how it looks like when you try to apply the engineering concept of motion conversion using lego gears, beams and connectors.
To add kinetic energy to the forward motion, I added a rubber band to the link, you will see this in action with the rubber band attach in the video that I also included in this blog feel free to scroll down if you want to watch it right now.
THE CREATION OF MY UNMANNED SHOOTING MACHINE PROTOTYPE
Science fiction always fascinates me ever since I was kid. I also used to play shooting games that involves machine as playable in-game characters during my highschool and college days. With my busy schedule I tried to play a robot themed game recently when it popped up in my facebook news feeds. So, it made me think to try building a robot that has shooting capability. I thought it would be fun for me to come up with a shooting mechanism based on my current background in lego technic and then install that shooting device on a vehicle that will look like the cool design of those that are seen in science fiction movies.

{kind=link}
THE BUILD
AUTOMATIC CANNON
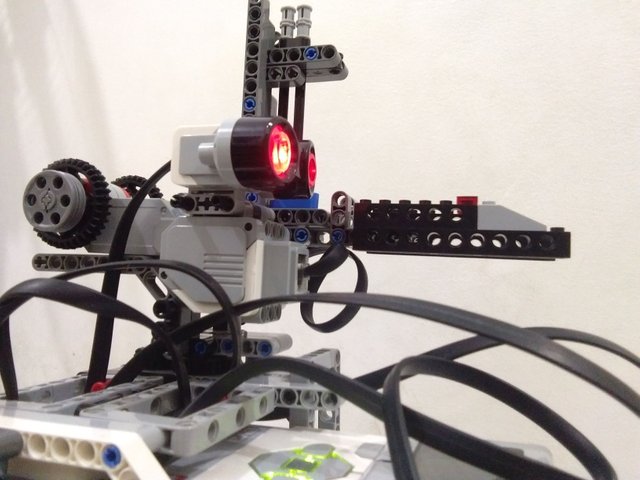
This cannon can fire upto eight(8) rounds of ammunition, not real ammo just lego parts which is the 3 module beam…😊
It has an ultrasonic sensor installed that goes the pointing direction of the cannon for dual purpose, first is to find any target in range and second to increase the chance of hitting or the accuracy.
The cannon is powered by one motor.
The base of the cannon also has another motor, and this enables the cannon to be able to rotate in 360 degree.
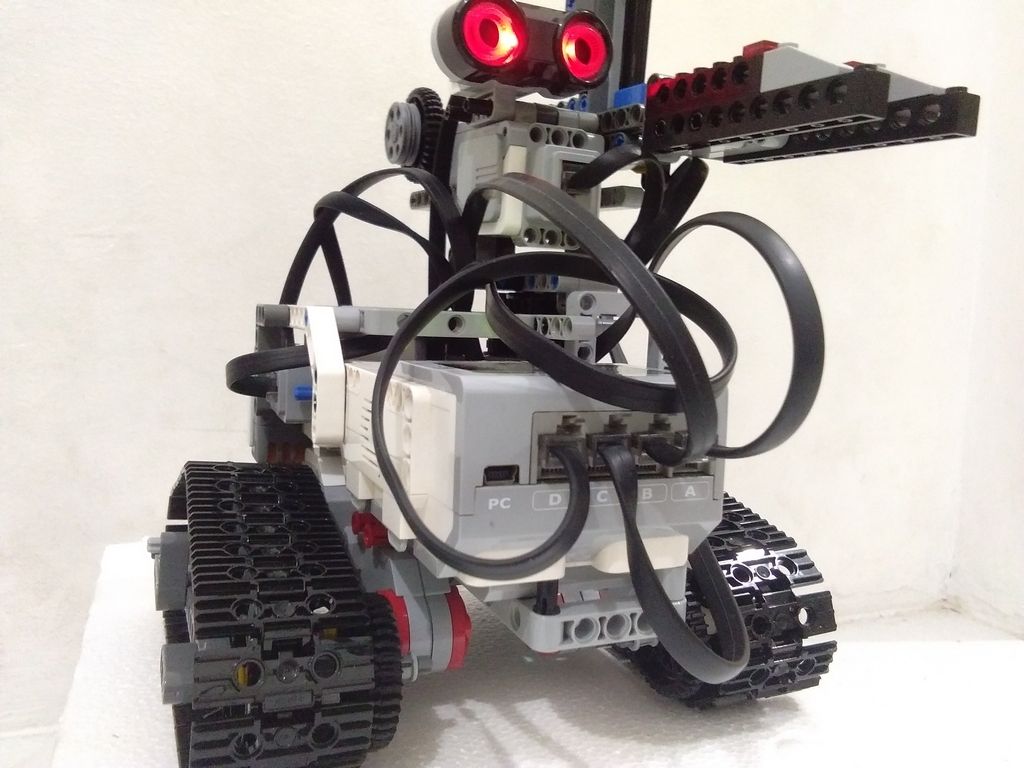
THE TRACKS
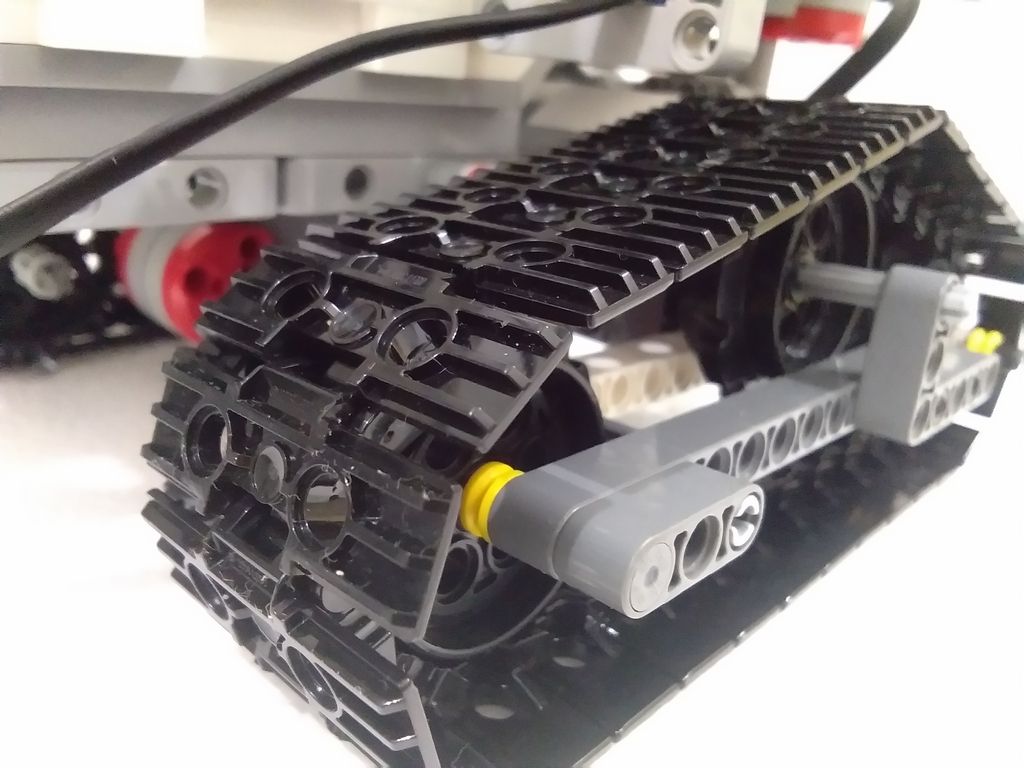
While the main purpose of using tracks in a vehicle is to add the ability of maneuvering even with toughest terrain out there, for me I will definitely use it with this build because it looks really cool.
SOUND SENSOR
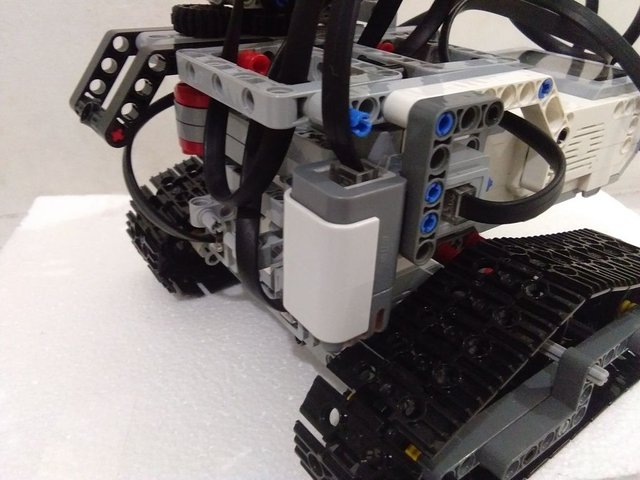
This allows the robot the ability to response from a sound frequency based on your program, you can have the robot response to a certain sound such as a hand-clap or a shout. A simple idea is to produce a sound that will initiate the robot to start moving.
TWO LARGE MOTORS
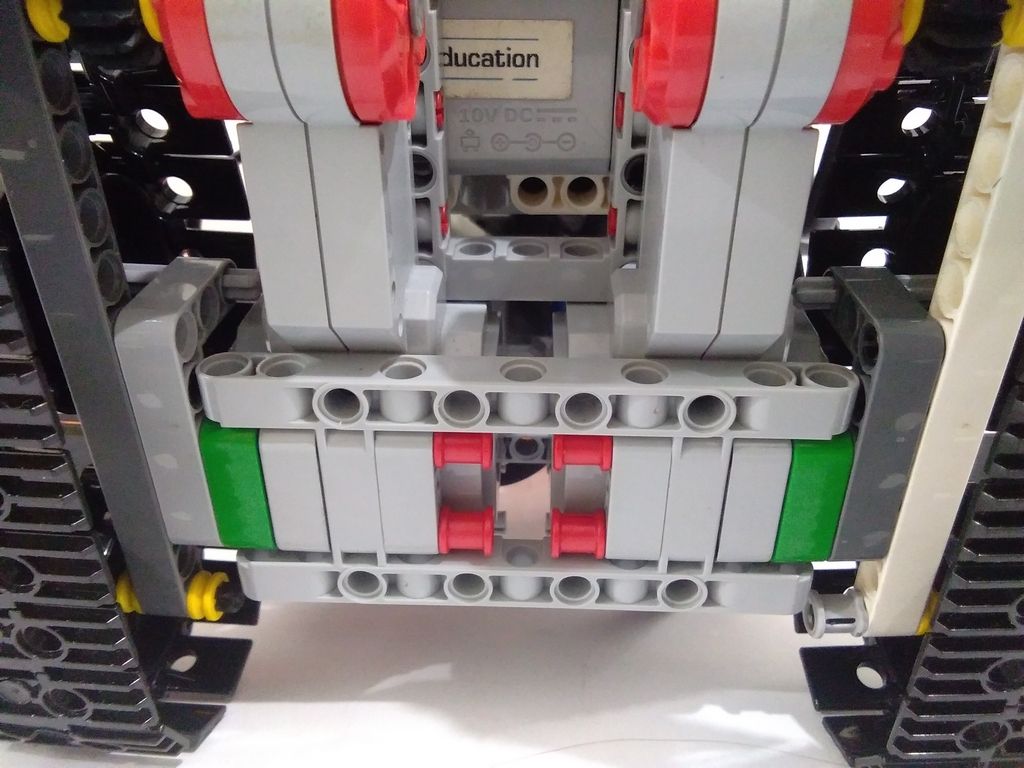
This build is a bit heavy you will really have to use two large motors for it be able to move efficiently and carry the vehicle weight by itself. The tracks itself will be causing a lot of friction on the ground compare to a regular wheel. Large motors are really required as well as gearing to ensure that the motors will not suffer heavy resistance from its weight.
WATCH IT MOVING AND SHOOTING 3 TARGETS IN THIS VIDEO
I hope that this has been interesting and informative for you, and I'd like to thank you for reading!

Please support @surpassinggoogle, you can vote for him as a witness or you can set his username as a proxy just like what I did.

Credits: mechanical-inventors.wikispaces.com for the crank link diagram | tsaber.devianart.com for the tank art
I've watched your video again, the shooting mechanism is quite strong that it can take down those paper cups. Excellent work!
Thanks for the appreciation. Have a good one!