KAMBRIA: Enabling AI & robotics development faster, cheaper & easier
Kambria is a decentralized open innovation platform managed by Kambria International (“KI”) that will cultivate a collaborative ecosystem, with the aim of drastically quickening the development, acceptance and use of the world's most advanced robotic technologies. The founders named the platform Kambria, after the Cambrian Explosion, 500 million years ago, when an accelerated evolutionary rate gave rise to biodiversity and abundance. They believe the Kambria Platform will be the impetus for a comparative blast in robotic innovations.
KI’s mission is to greatly speed up the process of innovation, enabling faster, cheaper, and easier development and adoption of technologies. The current advancement in the robotics industry is hindered by siloed improvement, squandered work, and high startup costs. Therefore, the pace of development is unnecessarily hindered. Kambria's creation was conceived out of the longing to quicken this procedure by drawing in a network of engineers, giving them the essential tools, and associating them through the market demand
The Kambria Platform is based on blockchain. By bringing in crypto-economics into the robotics development cycle, the Kambria Platform can be leveraged to reward cooperation and penalize defection to
- Achieve a dramatically lower barrier of entry for individuals and small teams to work together;
- Provide economic motivation to contribute;
- Capitalize on network effects to aggregate compelling technology;
- Provide intermediation for the end-to-end robotics business challenges; and lastly
- Detect and denounce violations of lawful rights to reduce the “free rider” effect.

Flaws of Modern Robotics
The revolution of industrial robots was fueled by progression in processing power and artificial intelligence. The former enabled robots to be programmed. The latter gave robots complex reasoning capacity. All the more of late, robots have utilize sensors to communicate with the real world to deal with a wide range of tasks. in spite of the fact that robots have succeeded in finding their place in manufacturing, they have not yet been generally embraced in the home. After more than half a century of research, progress has been slow in making affordable robots that can address our ordinary needs in the home. Some of the flaws of present-day robotics are highlighted below.
- The absence of good interfaces and abstraction layers for software, electrical, and mechanical systems. This leads to a bias towards monolithic and non-modular designs. It also results in a requirement for major redesign effort for any changes. Lack of good design makes the design hard to reuse by others and continues the cycle of waste. since no common point is available for developers to work off in parallel, this reduces efficiency
- Lack of tools, semantics, and methods to share parts of designs in distributed fashion. Engineering domains involved in robot design (mechanical, electrical, etc.). most of them lack good equipment and tools for collaboration and sharing. The lack of methods to share parts of design sometimes leads to missing semantic linkages across systems, software design to electrical engineering inclusive, and electrical engineering to mechanical engineering
- Significant portions of expended effort are implicitly discarded. The duplicated effort by Robotic producers to find good suppliers, select parts, arrange terms, verify paperwork, and assemble an in-house team. In addition not very many viable guidelines or directions to capture the comprehensive start-to-end process information
- Robotic applications are slow, expensive, and hard to make. Innovation is slowed. Lack of open platform and improvement tools makes it difficult to quicken innovation and most exploratory improvement is bootstrapped and not bolstered. Capital financing is just offered to large-scale or mature ventures.
As a result of these challenges, the current pace of robotics innovation is unnecessairly slowed
Kambria Architecture and Utility Token Model
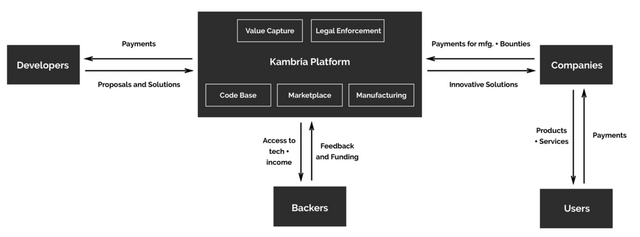
The Kambria Platform build-up is made up of five pillars:
- Code Base (KDNA)
- Innovation marketplace
- Manufacturing alliance
- Value capture
- Legal enforcement.
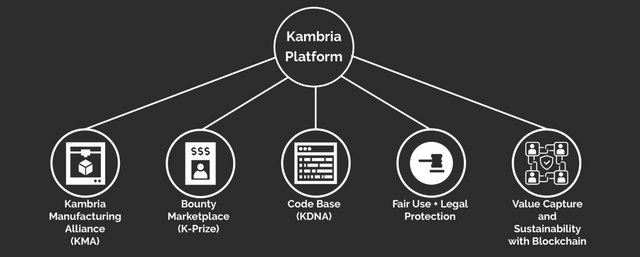
The shortfalls of modern robotics development mentioned earlier are directly tackled by each pillar and is built to maximize the incentives for collaborative development.
Interactions on the platform are facilitated by KAT and Kambria Karma. KAT is a native ERC20 utility token created, issued and deployed by KTI. Its main functions are to enable access to the Kambria Platform, reward participation, and align incentives for all stakeholders in the ecosystem.
Kambria Karma is not an ERC20 token, but rather a non-tradeable ledger entry for wallet addresses. Kambria Karma is used to track actual work performed. It is also an incentive to promote useful work and is awarded for concrete contributions. Details will be explained further in subsequent sections.
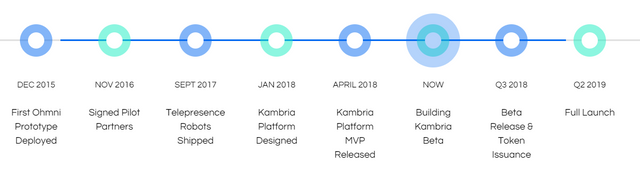
ROADMAP
The purpose of the Kambria platform for open innovation in robotics is to free the robotics industry from the shortfalls of Modern Robotics and quicken the evolution of robotics technologies. The future is too important to be controlled by a select few entities and the responsibility of the robotics community is to make sure that the development of robots is going to be more equitable and utilitarian. The robotics community has to find ways to collectively govern, gain and benefit from the coming revolution in robotics.
For more info check out Kambria Website and Kambria whitepaper.
Bounty0x Username: ifeakinola