MOVIMIENTO CIRCULAR UNIFORME: VECTORES DE POSICIÓN, VELOCIDAD Y ACELERACIÓN.
Saludos comunidad de Steemit en español, hoy vengo a compartirles un trabajo que he publicado anteriormente en ingles y que ahora hago su versión en español. Este artículo va en la línea de enseñanza de la física en la cual es donde más me desempeño y en esta oportunidad he querido escribir sobre este tema relacionado al movimiento circular uniforme, y lo hago en este caso enfocando la atención en los vectores posición, velocidad y aceleración que experimenta un móvil ejecutando este tipo de movimiento, ya que he observado en algunos libros de texto de física básica en los cuales se hace muy poco o ningún tratamiento sobre estos puntos del tema de movimiento circular uniforme. Como profesor de física básica que soy, me toca explicar este tipo de movimiento y cuando lo hago incluyo el tratamiento sobre estos vectores con el fin de hacer más completo el conocimiento sobre el tema así como mostrar a los estudiantes la utilidad e importancia de los vectores en física. Dicha esta breve introducción, COMENCEMOS...
El movimiento circular uniforme (MCU) es aquel en el cual el móvil se desplaza describiendo una trayectoria circular (circunferencia). Dicha circunferencia tiene un radio (el cual es un elemento característico de ésta). En este tipo de movimiento el desplazamiento no es lineal sino angular, sin embargo, puede establecerse una conexión entre los desplazamientos lineal y angular.
En la figura 1 se muestra un móvil, representado por un carro que se ha desplazado un ángulo Δθ = θf – θi medido desde el eje x positivo y recorre una longitud de arco ΔS = Sf – Si, este arco es una curva que representa parte de la circunferencia. Por lo tanto es una longitud la cual no es angular (se mide en unidades de longitud) y todo esto ocurre durante un intervalo de tiempo Δt = tf - ti. Igualmente podemos ver el radio de la circunferencia el cual va desde el centro de esta hasta un punto cualquiera del círculo. Es importante destacar que el desplazamiento angular Δθ es uniforme, lo cual significa que en los intervalos de tiempos dados Δt se realiza el mismo desplazamiento angular.
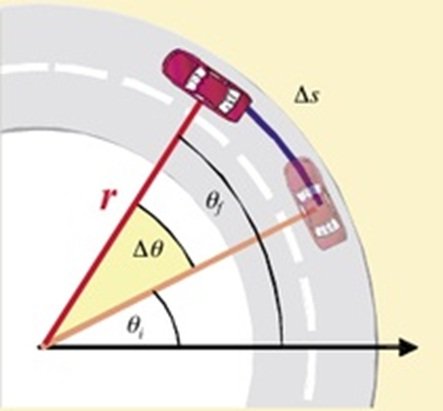
Figura 1: Representación del Movimiento Circular Uniforme. Imagen tomada de https://www.fisic.ch/contenidos/cinem%C3%A1tica-rotacional/mcu/
Aplicando la ecuación geométrica para calcular la longitud de arco, puede hallarse la relación entre el radio, el desplazamiento angular y el desplazamiento de arco:
 (1)
(1)
Nótese que las cantidades cambiantes en esta ecuación son la longitud de arco y la posición o desplazamiento angular, mientras que el radio se mantiene constante pues este cumple con su definición geométrica.
El otro elemento que presenta cambios es el tiempo. Por lo tanto, considerando la variación temporal se tiene:
 (2)
(2)
La cantidad ΔS/ Δt representa la magnitud de la velocidad lineal v del móvil en MCU la cual es constante (en magnitud). La cantidad Δθ/ Δt representa la medida del cambio de la posición angular con respecto al tiempo, esta se denomina rapidez angular, se representa con la letra griega omega (ω) y puesto que el cambio en la posición angular es uniforme, entonces ω es constante, por esta razón se denomina movimiento circular uniforme. La ecuación (2) puede reescribirse:
 (3)
(3)
Donde podemos ver la relación entre el desplazamiento angular y el desplazamiento lineal. Las unidades de ω en el sistema internacional de unidades es el radian/segundo (rad/s).
Si en la ecuación (2) se toma el límite cuando Δt tiende a cero en el lado derecho de la igualdad se tendrá:
 (4)
(4)
Ahora, se deducirán las expresiones para la posición, velocidad y aceleración en el movimiento circular uniforme en forma vectorial.
La figura 2.I muestra la trayectoria circular de la partícula representada por el punto P. El radio de la circunferencia es el radiovector que permite ubicar a la partícula sobre la circunferencia, r será un vector cuyas componentes rectangulares son rx y ry. Para el desplazamiento angular, consideraremos θi = 0 y ti = 0 como condiciones iniciales, de tal manera que el desplazamiento angular Δθ = θ y el giro lo tomaremos en sentido antihorario.
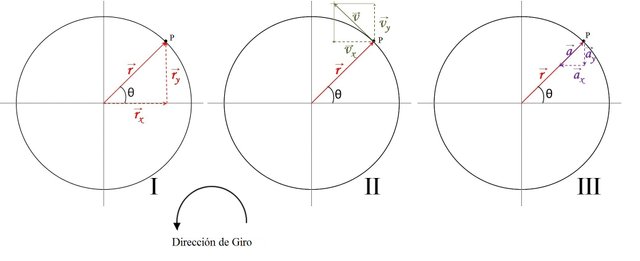
Figura 2: I) vector posición, II) vector velocidad, III) vector aceleración y sus correspondientes componentes para una partícula en Movimiento Circular Uniforme. Imagen realizada por @zambranoacosta usando Microsoft PowePoint 2012 y Microsoft paint.
Aplicando trigonometría básica se tiene:
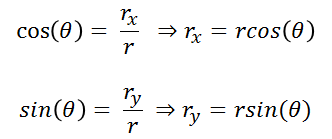 (5)
(5)
Considerando r como un vector, este puede escribirse en términos de los vectores unitarios rectangulares i y j como sigue:
 (6)
(6)
Sustituyendo la ecuación (5) en (6):
 (7)
(7)
De esta ecuación puede verse lo siguiente:
 (8)
(8)
Esta última expresión muestra la dirección radial (el vector unitario r) del vector posición r.
Como puede verse, la magnitud del vector posición es precisamente el valor o la medida del radio de la circunferencia y los signos de las componentes en términos de i y j denotan lo observado en la figura 2.I, la componente vertical apunta hacia arriba (y positiva) y la componente horizontal apunta hacia la derecha (x positiva).
El vector velocidad se obtiene sacando la derivada del vector posición con respecto al tiempo:
 (9)
(9)
Las ecuaciones (9) dan las componentes rectangulares vx y vy de la velocidad y nos dice que la componente horizontal apunta hacia la izquierda (x negativo) y la componente vertical apunta hacia arriba (y positiva). Además también se obtiene de las ecuaciones (9) que la magnitud de la velocidad es rω tal y como se obtuvo en la ecuación (3).
La figura 2.II muestra las componentes del vector velocidad. Al sumar vectorialmente estas componentes vemos gráficamente al vector velocidad y observamos que éste es tangente a la circunferencia. Otro resultado de las ecuaciones (9) muestra que la magnitud de la velocidad es constante, pero la dirección y sentido sí varían. Por lo tanto, al ser constante la magnitud del vector velocidad, no existe aceleración tangencial. Igualmente la figura 2.II revela que el vector velocidad es perpendicular (o normal) al vector posición r.
Tomando la derivada de la velocidad con respecto del tiempo (es decir, se deriva la ecuación (9) con respecto al tiempo), obtendremos la aceleración del móvil que describe una trayectoria circular:
 (10)
(10)
La ecuación (10) dice que la componente horizontal del vector aceleración apunta hacia la izquierda (x negativa) y la componente vertical apunta hacia abajo (y negativa) y al hacer la suma vectorial, vemos que la aceleración tiene la misma dirección del vector posición r (dirección radial) y apunta hacia el centro de la circunferencia, esta se conoce como “aceleración centrípeta” (que significa dirigida hacia el centro) tal como se muestra en la figura 2.III.
Estos resultados han sido deducidos aplicando la matemática básica, pero ¿qué dice la física? En la figura 3 vemos algunos ejemplos.
La figura 3.I muestra a una persona haciendo girar un objeto (una piedra o una pelota) que está atada a una cuerda la cual proporcionará el radio de la trayectoria circular. La tensión en la cuerda producirá un “tirón” hacia la mano que la sostiene (donde está el centro de la circunferencia). Esto confirma la presencia de la aceleración centrípeta. Por otro lado, si la cuerda se rompe, el objeto saldrá disparado en línea recta y de forma tangente a la circunferencia, demostrando que la velocidad lineal es tangencial.
La figura 3.II muestra un engranaje o rueda dentada que encaja en un engranaje recto (o lineal). Cuando la rueda dentada gira, transmite su movimiento rotacional a la otra pieza, la cual se moverá en línea recta tangente a la rueda dentada, esto corrobora la relación entre el movimiento lineal y el circular.
La figura 3.III muestra la luna girando en órbita circular uniforme en torno a la tierra. La cuerda “invisible” que ata a la luna con la tierra es la gravedad, la cual va desde el centro de la luna hacia el centro de la tierra (centro geométrico de la circunferencia descrita en la órbita).
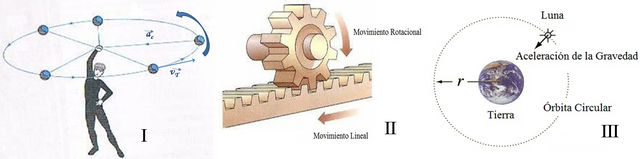
Figura 3: I) relación entre la aceleración centrípeta, velocidad tangencial y la trayectoria circular, II) relación entre el movimiento angular y movilmiento lieal, III) ejemplo de MCU en la órbita de la luna alrededor de la tierra. Imagenes tomadas de:
https://colcafe.wordpress.com/movimiento-circular-uniforme/
http://www.profesorenlinea.cl/fisica/MovimientoCircular.html
http://hyperphysics.phy-astr.gsu.edu/hbasees/orbv.html
y editadas por @zambranoacosta usando Microsoft PowerPoint 2010 y Microsoft paint.
Las componentes del vector velocidad y del vector aceleración fueron obtenidas aplicando derivadas, pero también pueden obtenerse aplicando geometría de la siguiente manera. Con referencia a la figura 2.II, extrayendo de ella el vector velocidad, sus componentes y mostrando la relación angular con el desplazamiento angular θ, esto se observa en la figura 4.
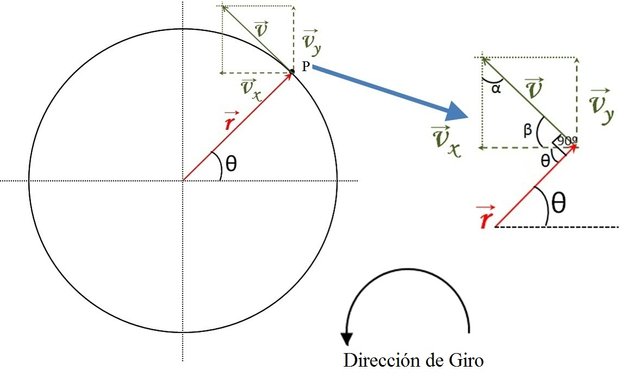
Figura 4: diagrama que muestra las componentes rectangulares del vector velocidad y algunas relaciones angulares para obtener el vector velocidad usando geometría. Imagen realizada por @zambranoacosta usando Microsoft PowerPoint 2010 y Microsoft paint.
En la figura vemos que el ángulo θ se repite en el ángulo que está entre el vector r y la componente x de la velocidad, además también se deduce que entre el vector velocidad y el vector posición hay 90°. De allí se tiene:
 (11)
(11)
Por otra parte, si se aplica el teorema de la suma de los ángulos internos de un triángulo:
 (12)
(12)
Al aplicar trigonometría con base en el ángulo θ finalmente hallamos las componentes del vector velocidad:
 (13)
(13)
En el caso de la aceleración, la geometría en base al ángulo θ y su relación con las componentes del vector aceleración es más sencilla de ver. Con referencia a la figura 2.III se extrae la figura 5.
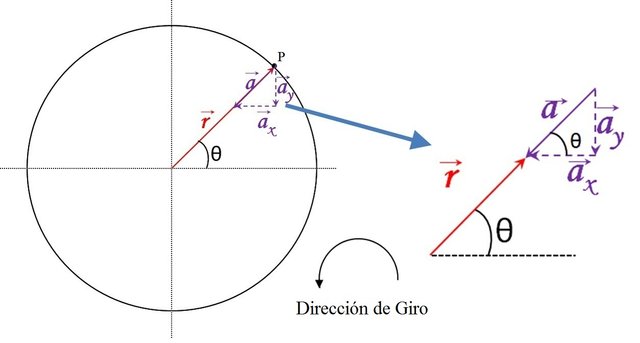
Figura 5: Diagrama que muestra las componentes rectangulares del vector aceleración y algunas relaciones angulares para obtener el vector aceleración usando geometría. Imagen realizada por @zambranoacosta usando Microsoft PowerPoint 2010 y Microsoft paint.
Puede notarse que θ entre el vector r y el eje x se repite en el ángulo que se forma entre el vector a y su componente horizontal por ser ángulos correspondientes.
Aplicando trigonometría, hallamos las componentes horizontal y vertical del vector aceleración:
 (14)
(14)
Como puede observarse, los resultados de las componentes de los vectores velocidad y aceleración fueron obtenidos en el primer cuadrante (ver figura 2, allí se muestra el circulo dividido en 4 partes o cuadrantes), si estos mismos resultados se aplican en el segundo cuadrante, se obtiene el resultado mostrado en la figura 6.
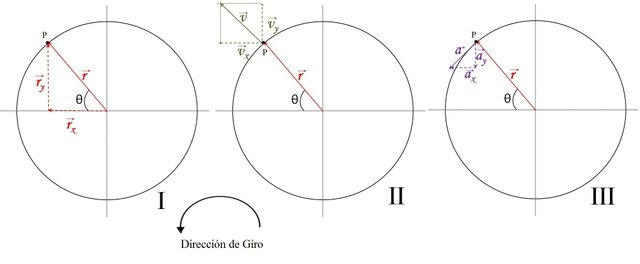
Figura 6: diagrama que muestra un dibujo "erroneo" de las componentes de los vectores posición, velocidad y aceleración en el segundo cuadrante, el error está en la ubicación del ángulo θ. Imagen realizada por @zambranoacosta usando MicrosoftPowerpoint y Microsoft paint.
Vemos en la figura que los resultados no concuerdan con lo que ya hemos comprobado. Pero si observamos bien, θ no está en el lugar que le corresponde (ver figura 6.I), θ debe tomarse partiendo desde +x y en este caso se han considerado las condiciones iniciales θi = 0 en ti = 0. Por lo tanto si θ es un ángulo que está en el segundo cuadrante partiendo desde +x y en sentido antihorario, θ > 90°. En este caso:
 (Condiciones para los signos del seno y coseno para ángulos localizados en el segundo cuadrante)
(Condiciones para los signos del seno y coseno para ángulos localizados en el segundo cuadrante)
Así, las componentes de los vectores posición, velocidad y aceleración se escriben así:
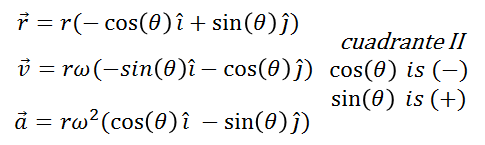 (15)
(15)
Aplicando el mismo razonamiento en el tercer y cuarto cuadrante, se tiene la corrección a los vectores posición, velocidad y aceleración, los resultados se muestran en las figuras 7, 8 y 9.
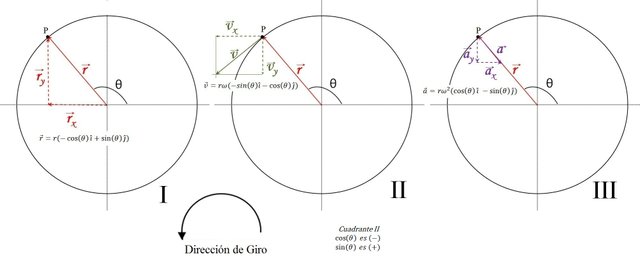
Figura 7: diagrama que muestra un gráfico correcto de las componentes rectangulares de los vectores posición, velocidad y aceleración en el segundo cuadrante. Imagen realizada por @zambranoacosta usando Microsoft PowerPoint y Microsoft paint.
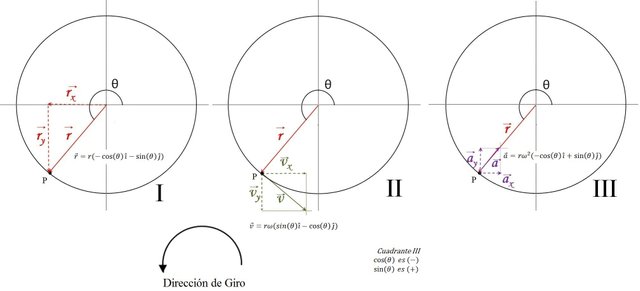
Figura 8: diagrama que muestra un gráfico correcto de las componentes rectangulares de los vectores posición, velocidad y aceleración en el tercer cuadrante. Imagen realizada por @zambranoacosta usando Microsoft PowerPoint y Microsoft paint.
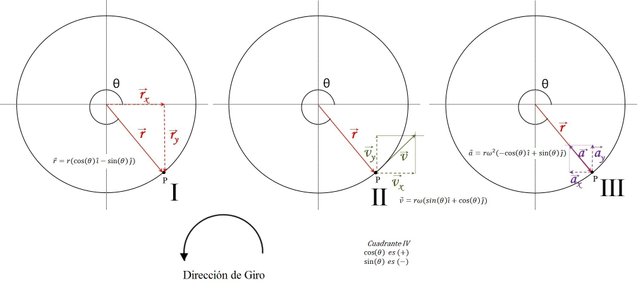
Figura 9: diagrama que muestra un gráfico correcto de las componentes rectangulares de los vectores posición, velocidad y aceleración en el cuarto cuadrante. Imagen realizada por @zambranoacosta usando Microsoft PowerPoint y Microsoft paint.
Podemos escribir la magnitud de la aceleración centrípeta en términos de la magnitud de la velocidad tangencial y el radio de la circunferencia descrita como sigue:
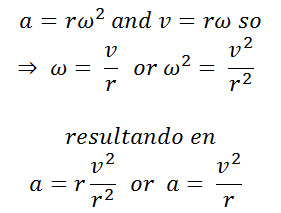 (16)
(16)
Algunos libros de texto o artículos relacionados al tema de MCU acostumbran a escribir el desplazamiento angular θ en términos de la rapidez angular ω y al tiempo de la siguiente manera:
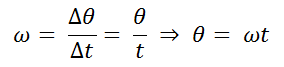 (17)
(17)
Por consiguiente, solo debemos cambiar el valor del ángulo θ en todas las ecuaciones donde esta aparezca. De nuevo estamos considerando las condiciones iniciales θi = 0 and ti = 0 en la ecuación (17)
Finalmente, cuando la partícula ha completado un ciclo, el desplazamiento angular total es 2π radianes y el tiempo necesario para recorrer este ángulo es conocido como período y es representado por la letra T (mayúscula), la cual se mide en segundos (en unidades del sistema internacional de unidades). Así mismo podemos contar el número de vueltas realizadas por un móvil en MCU por segundo, esto se conoce como frecuencia, se le denota con la letra f (en minúscula) y sus unidades son 1/segundo ó Hertz (Hz). Sin embargo en la práctica, es más utilizada la frecuencia en términos del número de vueltas por minuto o de revoluciones por minuto (rpm). El período y la frecuencia están relacionadas puesto que estas son cantidades recíprocas, en otras palabras, T = 1/f ó f = 1/T.
Por consiguiente, si utilizamos las relaciones entre el desplazamiento angular, la rapidez angular y el tiempo tendremos:
 (18)
(18)
Espero que este artículo ayude a entender mejor esta clase de movimiento el cual está clasificado como movimiento en dos dimensiones, en este trabajo he hecho una exposición de una parte de este tema que algunos libros de física básica no explican, especialmente la parte geométrica.
Si les gustó este artículo, apreciaría el apoyo que le den al mismo y si el trabajo alcanza suficientes votos, realizaré una continuación donde explicaré la relación angular entre los vectores velocidad angular y velocidad lineal.
Muchas gracias por ver el trabajo y cualquier pregunta, comentario o crítica constructiva que se haga al artículo en pro de mejorarlo, con mucho gusto estaré respondiendo.
Referencias:
Física Universitaria 12 edición; Sears y Zemansky, 2009, Adison Wesley.
https://www.quora.com/What-is-the-direction-of-acceleration-of-particle-in-a-uniform-circular-motion
https://www.fisic.ch/contenidos/cinem%C3%A1tica-rotacional/mcu/
http://www.profesorenlinea.cl/fisica/MovimientoCircular.html
Congratulations @zambranoacosta! You have completed the following achievement on the Steem blockchain and have been rewarded with new badge(s) :
Click here to view your Board of Honor
If you no longer want to receive notifications, reply to this comment with the word
STOPDo not miss the last post from @steemitboard:
Congratulations @zambranoacosta! You received a personal award!
You can view your badges on your Steem Board and compare to others on the Steem Ranking
Vote for @Steemitboard as a witness to get one more award and increased upvotes!