Project blog: Reviving the quadruped
Alright Steemians, I've finally got some minor project progress worth blogging about!
I've had this four-legged robot chassis sitting around since I built it last summer:

It's a little rough, and definitely heavier than I was hoping for, but I think it turned out alright for being made out of leftover servo motors and free scraps of plastic! Can you see it? It's clear plastic, and perfectly invisible. :)
All the parts were laser-cut and 3D printed at the Fort Collins Creator Hub by yours truly.
Unfortunately, I had to borrow its brain (a Raspberry Pi 3) for a school project about 9 months ago, and I just put it back in today... but here's where I left off with it (notice the electronic guts trailing out):
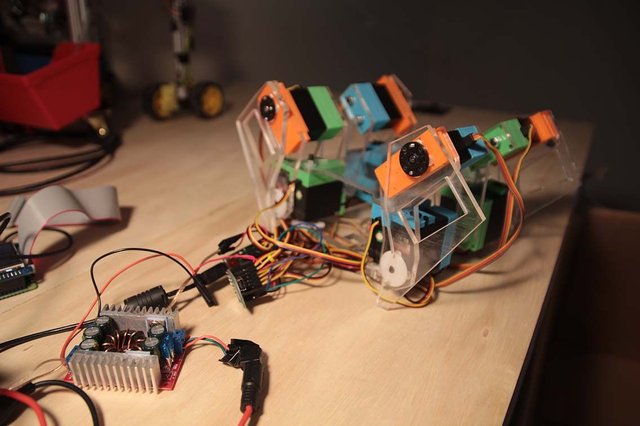
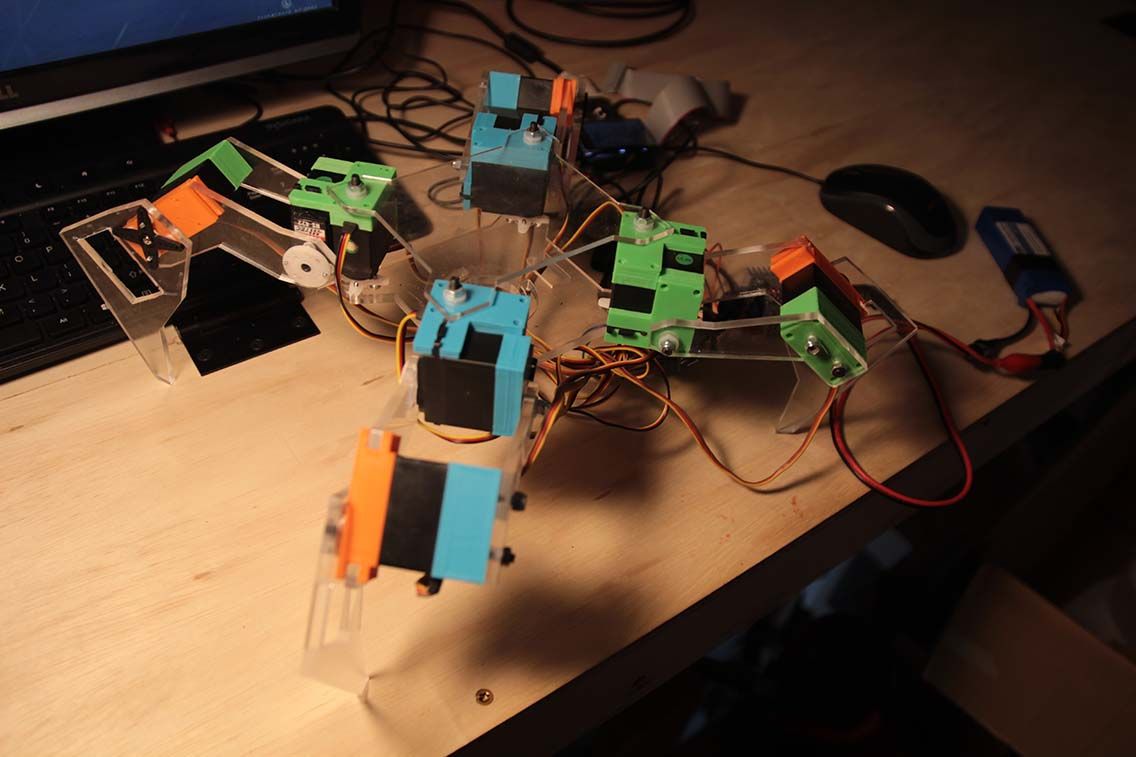
I don't have any video (yet), but before I brain-jacked it, it could fold up, stand up, and take one step on command!
That might not seen like much, but it wasn't perfectly straightforward to accomplish due to the mathematics and programming learning curve.
<technicalrant>
Basically, the biggest challenge of robotic legs (technically multi Degree Of Freedom (DOF) kinematic chains) is that you can't just tell the foot to go to some location relative to the body, you actually have to use inverse kinematics to back-calculate what motor angles you need to set to ultimately achieve that location. In my case it wasn't terribly hard because there are only two possible solution sets for any desired foot location (for each leg), and I read the article linked above... However, to properly model complex kinematic chains, you have to be pretty good with matrix mathematics. Read about Denavit-Hartenberg parameters...
It took me a bit to get comfortable with these ideas and learn Python to apply them to my 'bot.
</technicalrant>
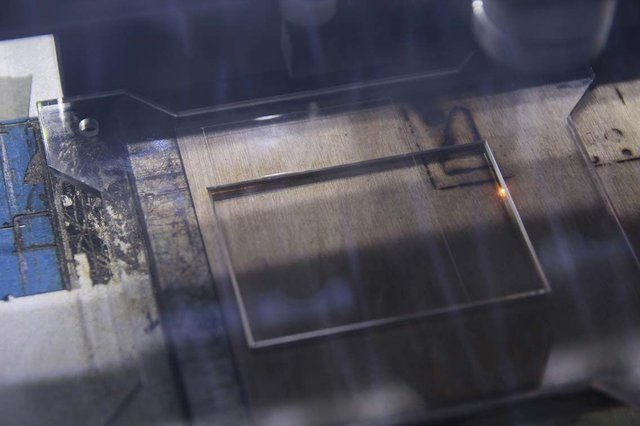
Well, anyway, after I recovered its brain I started cutting/drilling so that I can properly install the guts. Check out the laser cutter doing its thing!
And here's the 'Pi all safe in the body:
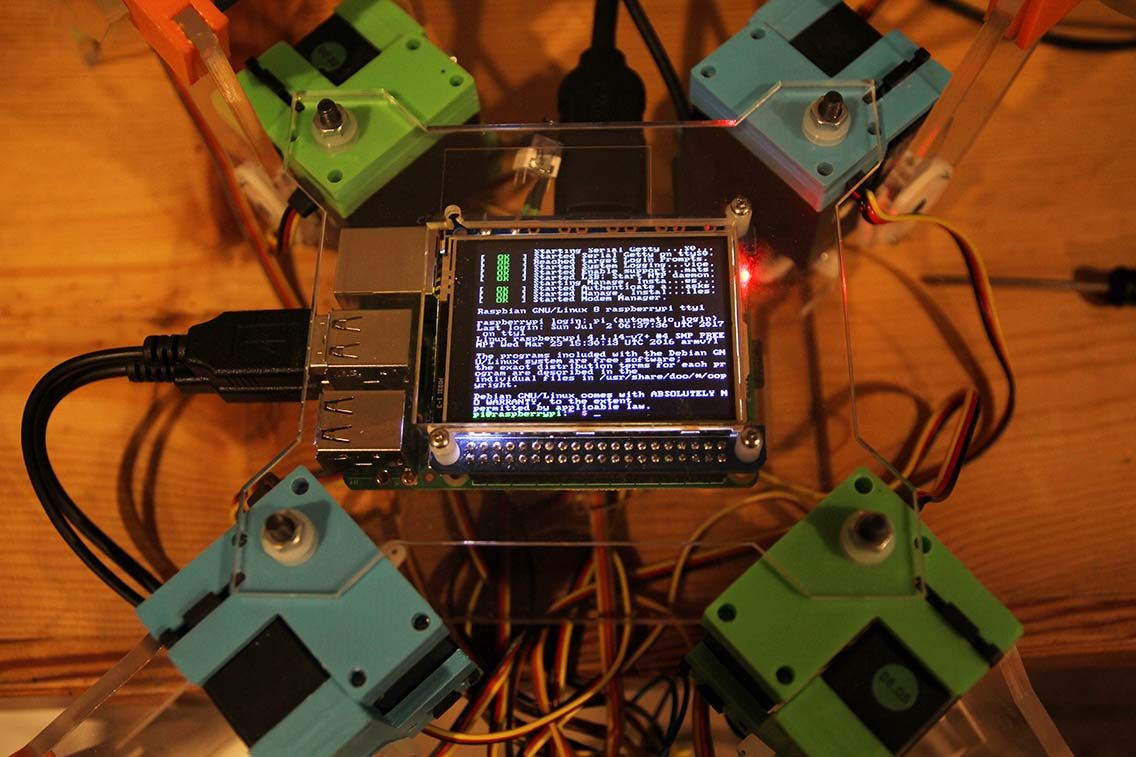
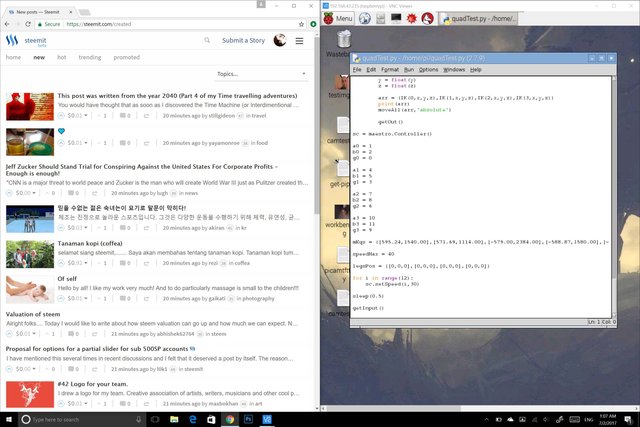
The last I did was get VNC (Virtual Network Computing) all set so that the robot can be free of all its external wires!
I'm pretty excited about that. Here's a screenshot showing the Raspberry Pi's desktop next to our beloved Steemit. All from the comfort of my laptop!
.jpg)
That's all I've got so far... for this project...
I also have a couple other, less cerebral projects that I plan to write about next week. Keep an eye out for those if you don't enjoy rants about mathematics!
Feel free to ask if you want more details, and don't forget to follow for more content!
Later Steem-friends!
Freakin' cool work, man! Mad skills!
Thanks man! It's got a long way to go though... I might have to change the leg dimensions because of the weight